Skinner
Printed From: MJF Forum
Category: Modelljernbane i alminnelighet
Forum Name: Sporleggeren
Forum Description: Om skinnegang, under/overbygning, signaler og kontaktledning. Dvs. jernbanens kjøreveg
URL: http://forum.mjf.no/forum_posts.asp?TID=9818
Printed Date: 22 november 2025 at 04:08
Software Version: Web Wiz Forums 12.05 - http://www.webwizforums.com
Topic: Skinner
Posted By: mikki
Subject: Skinner
Date Posted: 20 februar 2016 at 10:33
| Er i ferd med å planlegge utvidelse av mitt anlegg. Siden utvidelsen er tenkt i H0 ser jeg litt etter skinner. I mitt N-skala har jeg brukt Felischmann Piccolo, men føler ikke jeg er helt fornøyd med dette. Føler at det sliter med vekslere og pensemotorer som ikke fungerer optimalt. Kan dessuten tenke meg vekslere med servo. Skal kjøres digitalt, muligens også med mulighet for PC styring. Er der noen som har anbefalinger ang skinner, eller blir det nesten det samme hvilken type man velger???? |
Replies:
Posted By: ses
Date Posted: 20 februar 2016 at 11:14
|
Skinner: Flere muligheter. I Norge er Roco og Peco greit tilgjengelig. Tillig noen steder også, men disse faller en del dyrere, men er flotte å se på. Peco har flere størrelser (skinnehøyden), men jeg anbefaler code 75, evt. code 83 dersom man vil bruke veksler av amerikansk type (rett skinnekryss og rett spor etter krysset, "vanlig" Peco har kurve mer eller mindre gjennom hele avviksporet). Velg for all del et skinnesystem med fleksible skinner, dvs. at kurverradien er valgbar. Seksjonsskinner med fast kurveradius eller rett spor kan være nyttige på noen steder, men å bare bruke seksjonsskinner låser en unødig mye. Det krever litt mer arbeid å legge fleksibelt spor, men det er verdt det. Vekselmotorer: Den mest robuste vekselmotoren er Tortoise. Den har to innebygde vippebrytere. Den ene er nyttig for å polarisere skinnekrysset, dersom man har såkalt "live frog" eller "electro frog", dvs. at skinnekrysset er elektrisk isolert fra skinnene som går videre. Tortoise kan betjenes med både strømpuls og strøm stående på hele tiden. Motoren drives med likestrøm og polariteten bestemmer hvilken posisjon motoren skal innta. Ulempen med Tortoise er at den er ganske stor, så den krever litt plass under sporvekselen. Nettopp på grunn av plassproblematikken, har vi i TMJK brukt servoer i anleggets øverste etasje. Etter hvert har vi fått dette til å virke rimelig bra, men det har vært mye prøving og feiling. Økonomisk faller servoer med tilhørende styringselektronikk noe billigere ut enn Tortoise, men jeg er ganske klar på at jeg vil foretrekke Tortoise dersom det er mulig av plasshensyn. Litt om http://mjwiki.no/wiki/Sporveksel" rel="nofollow - sporveksler på MJ-wiki. ------------- Svein S |
Posted By: programmeringssporet
Date Posted: 20 februar 2016 at 13:43
|
Jeg skal prøve å svare objektivt på dette først : Det enkleste er selvfølgelig veksler med spolemotorer ferdig fra fabrikk, men forutsetter ganske klumpete løsninger, enten med motor synlig på siden, eller løsninger der motor ligger inne i skinneunderlaget (Trix, Roco Geoline). De er derfor lite aktuelt hvis det er fokus på det visuelle. Det er også utfordringer med driftsikkerhet - og vanskelig å bytte motorer avhengig av montering. Tortoise har vært benyttet i mange år for de som ønsker en bedre løsning. (Dette har ikke jeg testet) I de siste årene har de aller fleste entusiaster/selvbyggere tatt i bruk servoer, først å fremst fordi dette er masseprodusert hyllevare som kommer fra radiostyrte modeller med mye høyere produksjonsvolumer i forhold til modeljernbane. Servoer kan derfor skaffes fra ca. kr 50. De krever også styringselektronikk som koster fra nesten ingenting - til det samme som tradisjonelle løsninger, avhengig av hvor mye du ønsker å gjøre selv. Fordelene med servo blir da rimelig, driftsikkert, mulighet for å styre hastigheten, og mange alternative styringsmuligheter, både manuell, Digital og PC-styrt. Når det gjelder selve vekselprodusent, er det mange som velger Peco. Personlig har jeg alt mulig (H0: Trix, Roco, Peco - H0e/N: Fleishmann, Roco, Peco), men for øyeblikket bygger jeg med Peco i H0, bortsett fra noen kurveveksler, hvor jeg er avhengig av krappe Roco veksler. Jeg benytter Servoer og tester ut Arduinoer for styring. Der det er dårlig plass skal jeg teste med linjære servoer. Det jeg liker spesielt med Peco er den fjæren som holder vekselen i posisjon. Den er grei å ha før motor blir montert, og den er enkel å fjerne når servoen skal monteres. (når man ønsker langsom bevegelse - og ikke er avhengig av strømstyring (DCC). Med DCC bør man også forbedre strømforsyningen ved å lodde ledninger til alle skinnedelene i vekselen (Dette gjelder vel også for Roco?) |
Posted By: ses
Date Posted: 20 februar 2016 at 15:36
|
Problemene vi i TMJK har hatt med servoene er først og fremst av mekanisk art og det todelt: 1) Å holde servoen stabilt fast. Vi har brukt Tam Valleys holdere, og de er først med den siste utgaven i laserskåret finer blitt sikker nok. Tidligere utgaver i resinstøpte holdere baserte seg dels på friksjon, dels på skruefeste i én ende, og disse holdt ikke servoen sikkert nok i samme posisjon hele tiden. 2) Å få akutatoren som tar tak i hullet i omleggerstangen/svilla til å ikke gli ut. Utfordringen der har vært at aktuatoren etter en stund har trukket seg nedover, dels som følge av problemet i 1), og dermed plutselig kommet for lavt og sluppet omleggerstangen. Dels skyldes det at hornet på servoen er laget av så mykt materiale (delrin?) at det også har bidratt til for hvor godt aktuatoren holder seg innenfor ene millimeteren den skal i hullet i styrestanga. Er den nemlig for lang, kan den sette seg fast i lavtsittende deler på rullende matereill, slik som ploger og skinnerensevogners, og for så vidt også skinneviskelær. ------------- Svein S |
Posted By: programmeringssporet
Date Posted: 20 februar 2016 at 15:58
|
Svein, Antar dere bruker Peco ? Fjerner dere fjæren ? Min erfaring hittil er at det viktigste med servostyring - er å redusere kreftene. Hvis man gjør pensen "DCC friendly" / lodder på ekstra ledninger, trenger man liten kraft for å holde posisjonen. Da fungerer det best for meg |
Posted By: GETEL57
Date Posted: 20 februar 2016 at 20:00
|
Skinner: Valgtte Tillig fordi større utvalg i penser. Pris er litt høyere. Litt kronglete å få tredd på Tillig sine egne isolerlasker. Litt svak innfesting av tungeskinnen til vekselmekanismen. har modifisert noen med sville av printplate. Pensemotor: Valgte Tortoise, men har i senere tid også kjøpt noen DCC Concepts Cobalt motorer (samme prinsipp som Tortoise). Litt mindre og mer stillegående. 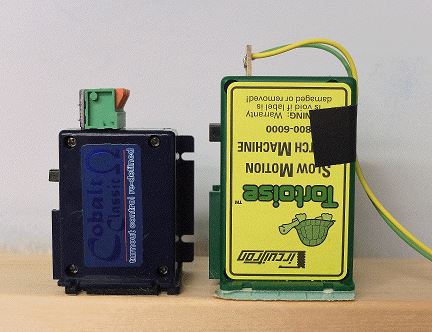 Styring av penser: Jeg ønsker å styre både via en styrepult og via ESU ECOS II sentralen. Jeg valgte derfor DCC Conpets sine komponenter AD-(FX og AD-2FX (DCC format). Disse styres direkte fra ECOS II eller via trykknapp. De gir også tilbakemelding, enkel å programere (i allefall med ECOS'en) og har direkte tilkobling for LED lys. Bildet under er fra skyggestasjonen under hovednivået og jeg valgte å legge dekoderne oppe på platen for enkel tilgang for programmering. Strømforsyning ti disse er via digital kretsen, Tortoise og Cobalt trekker lite strøm 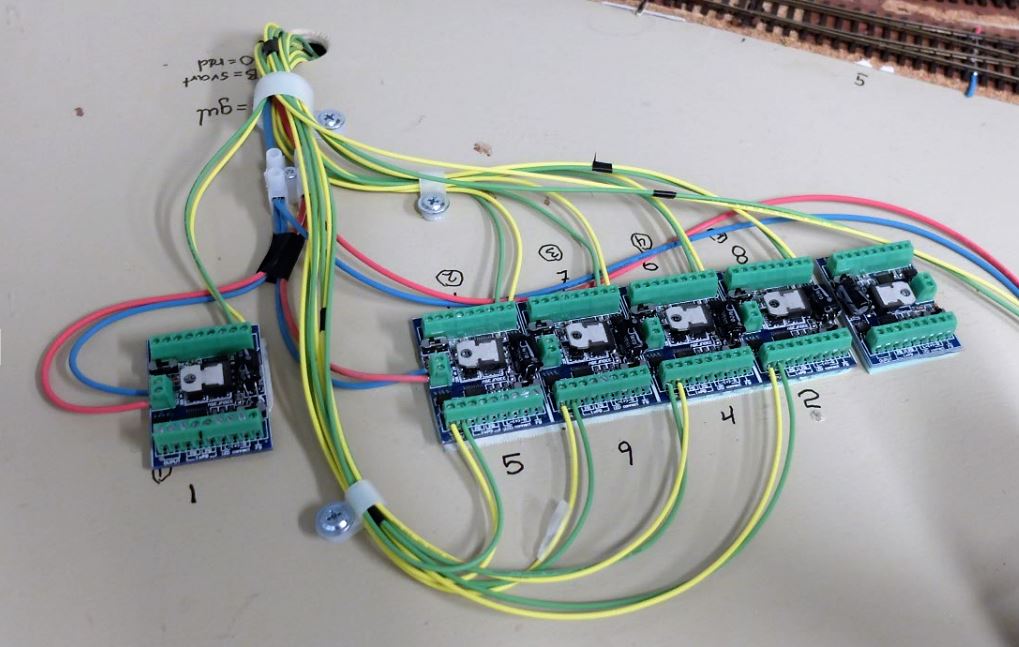 ------------- Terje |